产品:19
产品:19
 联系我们
联系我们

通常情况下,管线包的末端都是直接与机器人工具相连接,这样机器人在工作时管线包就难免会与工件、工装夹具等周边设备发生干涉。同时,管线包自身存在一定的弯曲限制。因此,在对机器人示教编程时管线包的干涉情况与弯曲程度也是要考虑到的一个关键因素。
在机器人虚拟仿真时,管线包同样是离线编程要考虑的重要因素。大部分的机器人虚拟仿真软件都具备柔性管线包仿真功能,PDPS软件也不例外。
PDPS软件具有两种机器人柔性管线包虚拟仿真方法,一种是使用外部导入的柔性管线包模型进行虚拟仿真,另一种是使用软件内置的“线缆”创建工具自定义柔性管线包进行虚拟仿真。
本期,先来介绍一下,PDPS软件首种实现机器人柔性管线包虚拟仿真的操作方法。
机器人管线包模型准备
要使用外部导入的机器人管线包模型实现虚拟仿真,就要事先准备好柔性管线包模型,并且管线包模型尺寸规格要与使用的机器人型号相匹配。

一般情况下,管线包的制造厂商都会提供制作好的柔性管线包模型,并且定义好了管线包模型的运动机构,仿真人员可以根据自己的需求向相关厂商咨询获取。
机器人管线包模型导入将准备好的管线包模型导入PDPS软件,在导入之前首先要定义管线包的类型,通常情况下管线包模型被定义为“ToolPrototype”类型,而机器人本体模型则仍然定义为“Robot”类型。类型定义成功后导入管线包模型,并将其加载到仿真项目中。机器人管线包模型放置到机器人在Process Simulate软件左侧的对象浏览树Object Tree中,将管线包模型切换为显示状态,使其在软件工作区中显示交替使用“Relocate”和“Placement Manipulator”快捷工具命令,将管线包模型放置到机器人上。放置过程中可以先使用“Relocate”快捷工具命令,在To 

然后再使用“Placement Manipulator”快捷工具命令,对管线包模型的角度和位置进行调整,使得管线包支撑架(俗称网球拍)卡在机器人J6关节法兰盘的合适位置处。
管线包模型与机器人模型实现资源组合
管线包模型要想在机器人模型运动时实现柔性动作,就要与机器人模型组合成一个整体,也就是实现资源组合。Process Simulate软件“Modeling”菜单栏的“Components”命令组中,点击“Create New Resource”命令按钮,在弹出的New Resource对话框中选择“EquipmentPrototype”,点击“OK”按钮。此时,左侧对象浏览树Object Tree中出现创建的名称为“EquipmentPrototype”的资源文件,并且处于“模型可编辑”状态。分别将机器人模型文件和管线包模型文件拖拽到新建的EquipmentPrototype资源文件下,然后将EquipmentPrototype资源文件进行重命名,名称不能与机器人或管线包重名,本例将其重命名为“kr180r2500extra_fupa”,如下图所示。
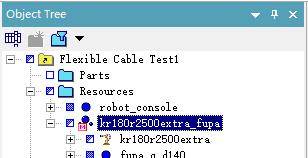
这样,通过新建的EquipmentPrototype资源文件就实现了管线包模型与机器人模型的资源组合。
管线包模型与机器人模型运动关联设置
管线包模型的柔性运动是伴随着机器人模型上臂3个关节的运动,也就是说当机器人上臂的J4、J5、J6关节运动时,管线包作为从动装置做出拉伸、收缩、弯曲、伸直等柔性运动。因此,管线包模型还要与机器人模型上臂的3个关节关联起来,以建立起主从耦合关系。左侧对象浏览树Object Tree中点选“kr180r2500extra_fupa”资源文件,然后在“Modeling”菜单栏的“Kinematic Device”命令组中,点击“Kinematics Editor”命令按钮,打开模型运动学编辑器对话框。使用“Create 
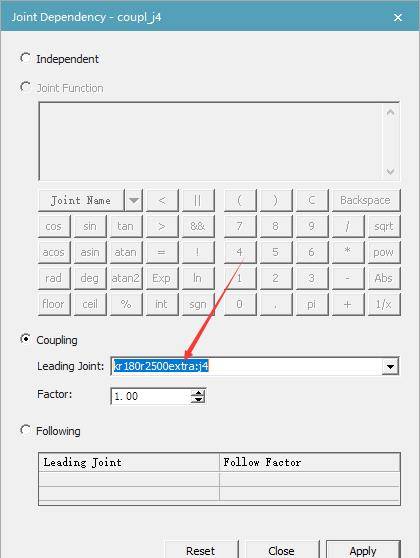
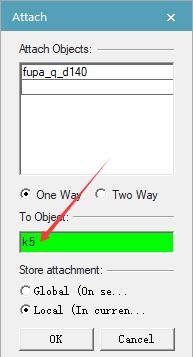
重复上述步骤,建立管线包模型与机器人模型之间剩余的主从耦合关系,详细对应关系如下所示:管线包模型Coupl_j5→机器人模型j5管线包模型Coupl_j6→机器人模型j6在创建主从耦合关系时,耦合因子Factor一般设置为1。当仿真运行时,管线包模型与机器人关节运动方向不一致时,可将其设置为-1。管线包模型安装到机器人管线包除了与机器人上臂关节耦合运动外,还要与机器人同步运动。因此,管线包模型必须要安装到机器人模型上。左侧对象浏览树Object Tree中点选管线包的资源文件“fupa_q_d140”,在“Home”菜单栏的“Tools”命令组中,点击“Attachment”,在其下拉菜单中选择“Attach”命令按钮,弹出Attach对话框。虚拟仿真时,管线包模型都是安装到机器人模型的J4关节(名称一般为k5)上,即在To Object下选择机器人的链接“k5”。点击“OK”按钮,管线包模型与机器人模型安装完成。
新机器人设备模型保存
左侧对象浏览树Object Tree中点选资源文件“kr180r2500extra_fupa”,在“Modeling”菜单栏的“Scope”命令组中,点击“End Modeling”命令按钮,取消模型可编辑状态。在弹出的Save Component As对话框中选择合适的模型存放文件夹,然后将其保存。
机器人管线包仿真运行测试
手动运行机器人,对添加的管线包模型进行仿真运行测试。在运行机器人的J4、J5、J6关节时,管线包模型伴随关节运动做出拉伸、收缩、弯曲、伸直等柔性运动,运动效果如下方动态图所示。